Background
The stiffness of a material or a structure is of key importance in countless applications, with positive stiffness as a common property for bearing loads and transferring motions, zero (or quasi-zero) stiffness for vibration isolation and protection, and negative stiffness for fast switching between states, high-speed actuation, and programmed deformation. Engineers have deliberately created various means to manipulate stiffness for applications ranging from automotive, robotics, to aerospace. Often these mechanisms are rather complicated (e.g., spring structures) and many times require considerable energy inputs (e.g., electromagnetic mechanism), which unfortunately cannot be employed in size-limiting applications (e.g., small sized robots, soft robots without rigid parts, or passive systems without power input), although these applications may benefit most from in-situ stiffness manipulation. To somewhat circumvent the complex structures and expensive energy input, mechanical metamaterials have been designed to achieve stiffness manipulation using simple mechanisms; however, for a given metamaterial, the range of manipulation is limited and cannot switch all the way from positive to negative.
Invention Description
Researchers at Arizona State University have developed curved origami-based metamaterials including a panel of material having a plurality of curved creases, each disposed within a plane of the panel (Fig. 1). The panel is configured to be folded along one of the plurality of creases, and also configured to be bent about an axis disposed outside the plane of the panel. Stiffness manipulation is achieved in situ by activation of different sets of curved creases. Another version of this invention features a panel having an elongate, curved opening disposed within the panel; the panel is folded about the opening such that the opening defines a crease. The metamaterial also may incorporate a motor-actuated cable coupled to each side of the panel. This motor allows pulling of the cable, which changes degree of folding and thus panel stiffness (Fig. 2).
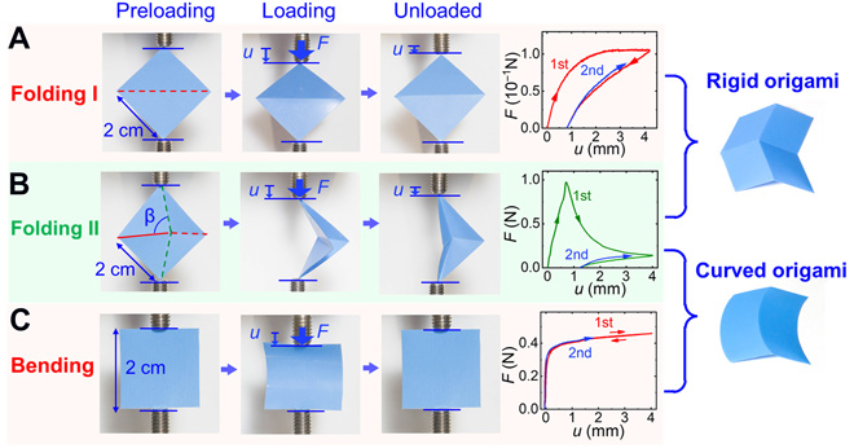
Fig 1. Mechanical behavior of a unit cell of the curved origami.
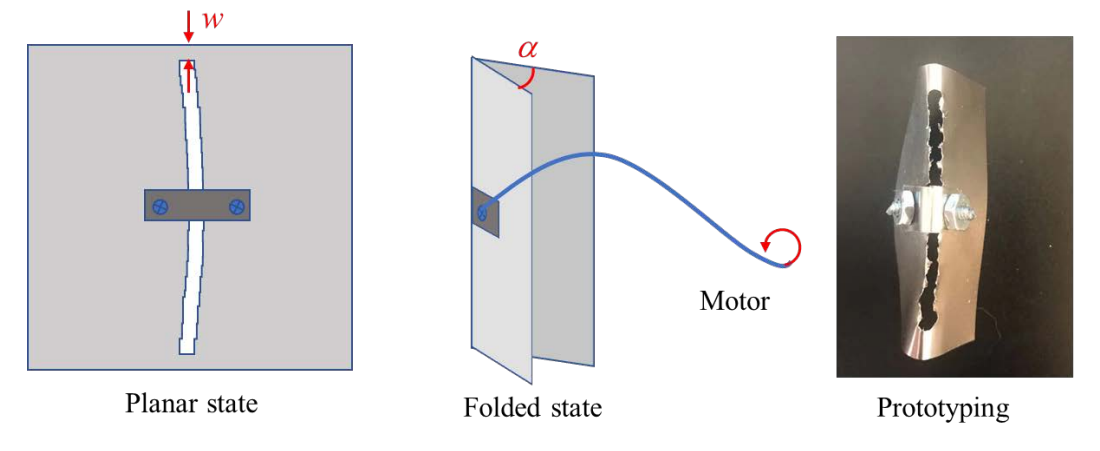
Fig. 2. Origami panel featuring a curved opening and cable-based folding.
Potential Applications
• Robotics
• Aerospace components
• Vehicular structural supports
• Biomedical devices
Related Publication: In situ stiffness manipulation using elegant curved origami