Because the hip joint provides about 40-50 percent of the total average positive power for walking, injuries to this joint, or to the spine, can have a drastic impact on walking capabilities. Between total hip replacements, stroke, and other gait deteriorating injuries, there is already a significant population of patients with mobility deficits involving the hip joint.
Devices that provide assistance to the hip, such as exosuits and exoskeletons, can improve ambulatory motions, including walking. While there has been continued development in this area of research in the past decade, current designs are still complicated, heavy and often expensive.
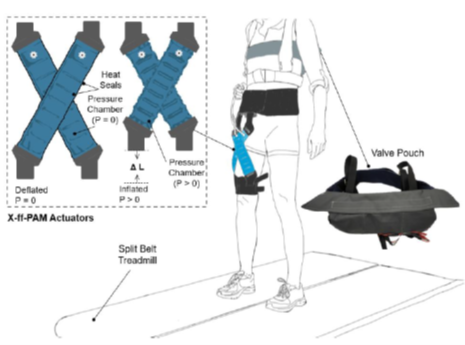
Researchers at Arizona State University have designed a soft robotic hip exosuit to assist human walking in hip flexion and extension. This exosuit mimics the shape and behavior of the gluteus maximus, semimembranosus and biceps femoris during extension, and the iliacus, rectus femoris and vastus medialis during flexion. The fabric portion of the suit structure is compliant so that forces are applied in a gentle ramp in assistance of motion to ensure user comfort.
The novel design and use of soft and pliable materials in this exosuit allow it to reduce muscle activation while still moving freely with the wearers natural range of motion.
Potential Applications
-
Hip flexion and extension assistance
-
Rehabilitation from stroke or other hip injuries
-
Benefits and Advantages
-
Comfortable – soft and compliant materials
-
Lower cost compared to similarly rigid systems
-
Lightweight and form fitting – can easily be worn over pants or shorts
-
Forces are applied in a gentle ramp in assistance for timely actuation and user comfort
-
Maximized user ROM in flexion and extension to prevent hip abduction and maintain a low profile
-
Contains minimal moving parts to prevent risk of pinching or shear injuries
For more information about this opportunity, please see
For more information about the inventor(s) and their research, please see